FischerBot
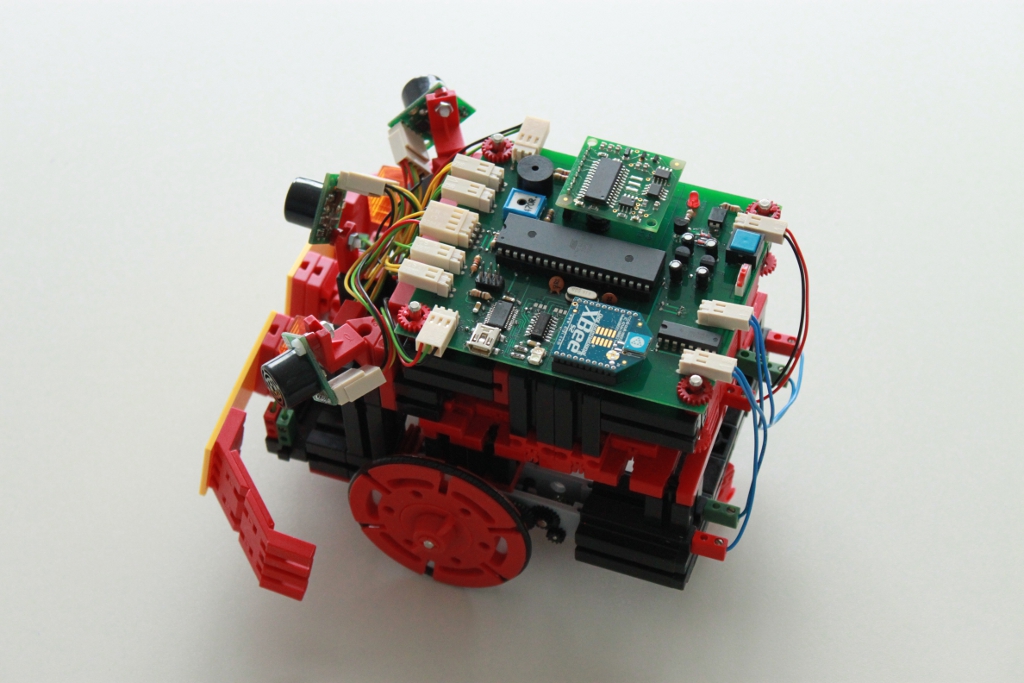
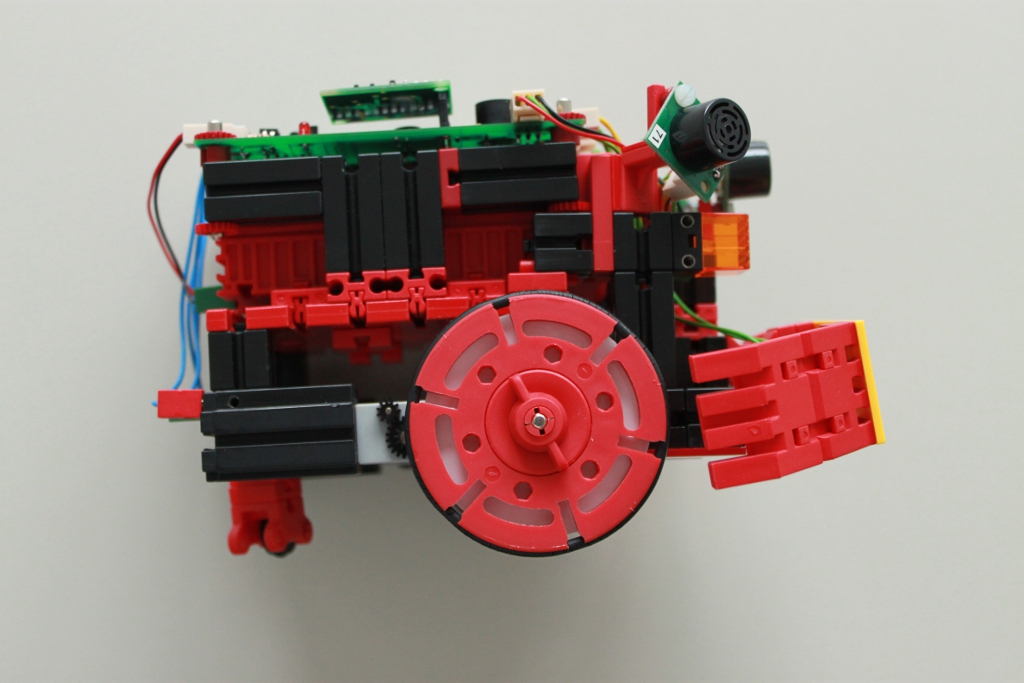
FischerBot is a two wheel robot, based on Arduino and equipped with sensors and motor control and mechanically build with parts from the fischertechnik® construction kit.
This may be one of the easiest way to build a robot with a complete custom design. You can buy fischertechnik® from ebay® and get motors, gears, switches, lights, etc. The best thing is, that you can try out many different robot designs. Just disassemble your current robot and build a new one!
Features:
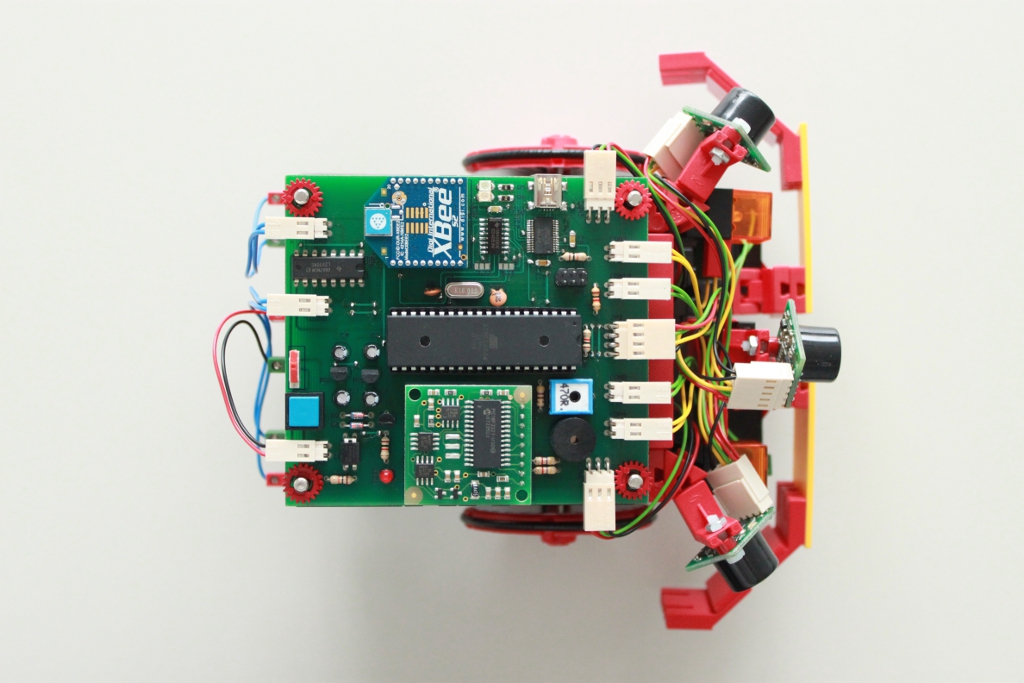
- ATmega1284P microcontroller
- Soft power switch
- USB to serial interface through FT232RL
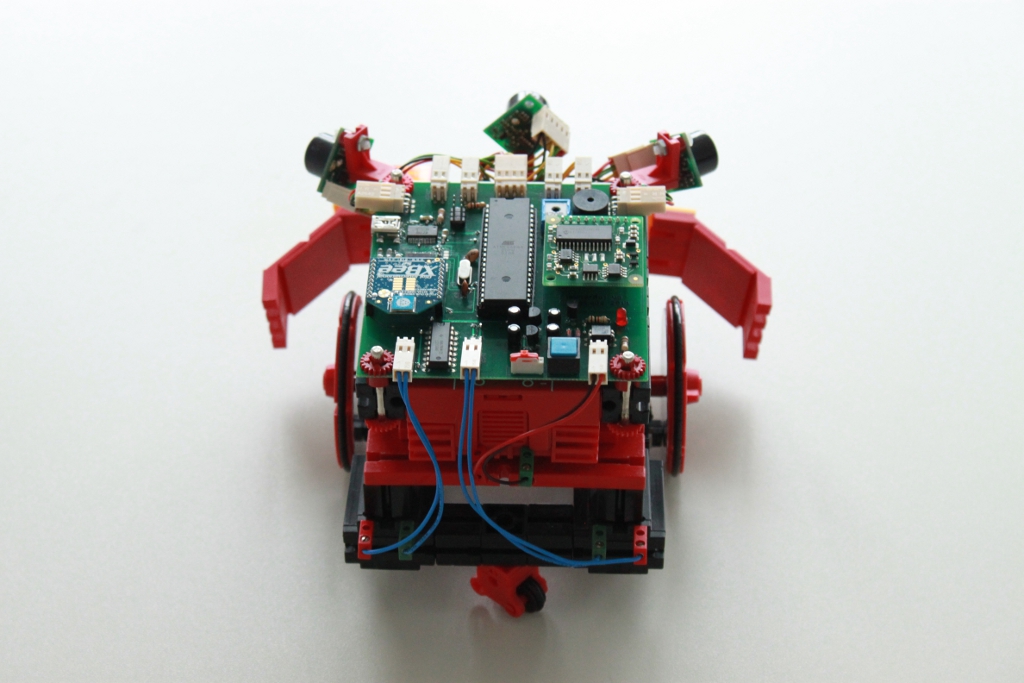
- Wireless serial connection through WiFly module (*)
- USB/WiFly serial can be programatically switched
- Piezo buzzer sound generation
- L293D motor driver for 2 motors
- 2 rotary encoders
- 2 LED lights
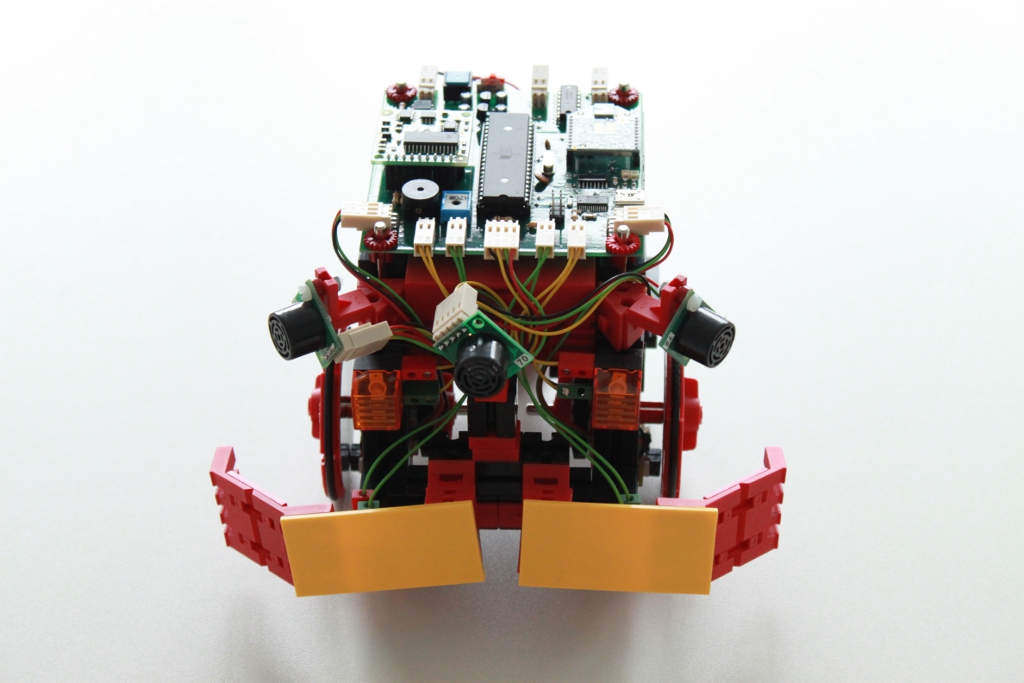
- 2 bumper switches
- I2C connector
- 3 ultrasonic distance sensors (SRF02) connected through I2C
- CMPS03 compass module connected through I2C
- ISP connector
(*) The pictures show the original version with an XBee module. WiFly modules are pin compatible with the XBee modules.
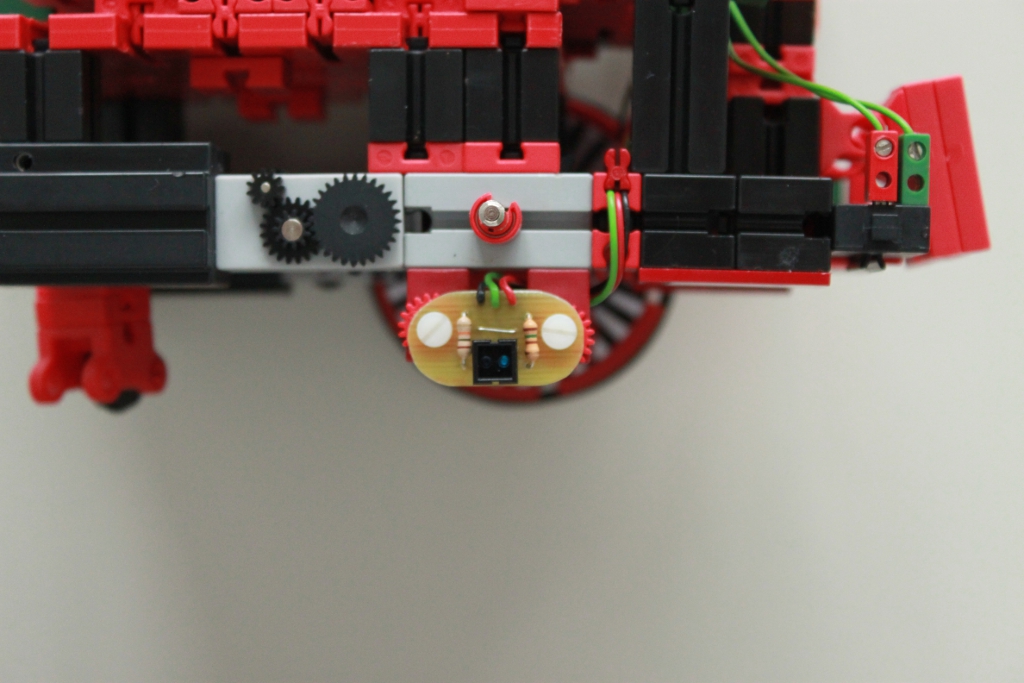
Wheel Rotary Encoders
The rotary encoders use a CNY70 reflective optical sensor and a disc consisting of black and white sectors. The CNY70 transistor is connected directly to the ATmega1284P port pins. This seems to work, but i have not fully tested the accuracy of this circuit.
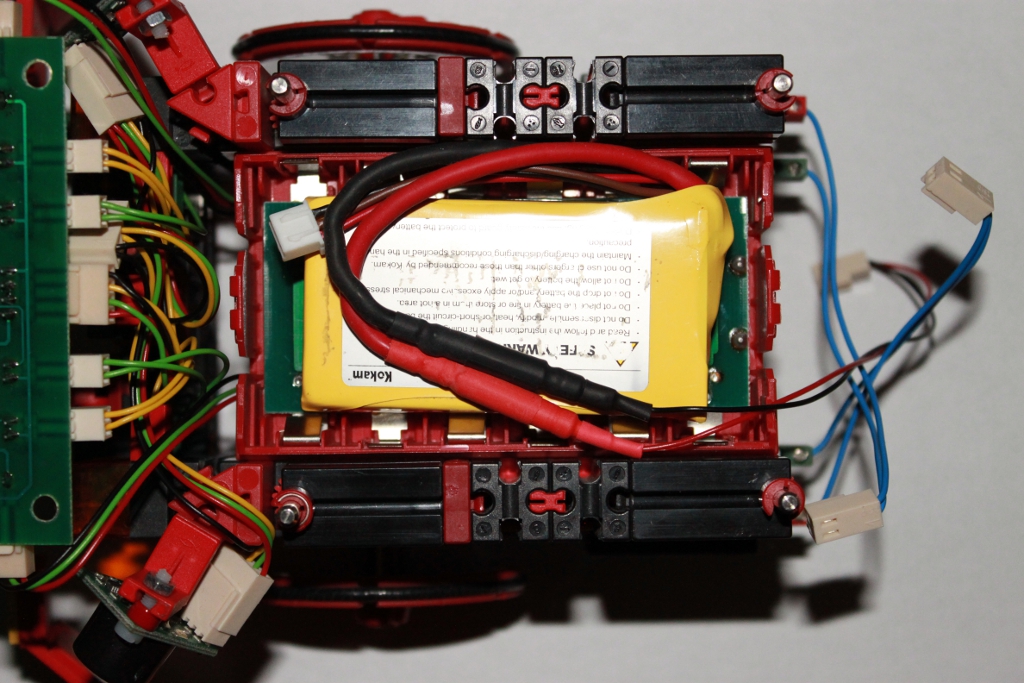
Power Supply
Although i use a fischertechnik® Power Block in my robot design which can be equipped with 6 AA batteries, it is always better to use a LiPo pack to drive the robot, since they can deliver more current. In this case its a 2 cell 7,2V 2000 mAh LiPo.
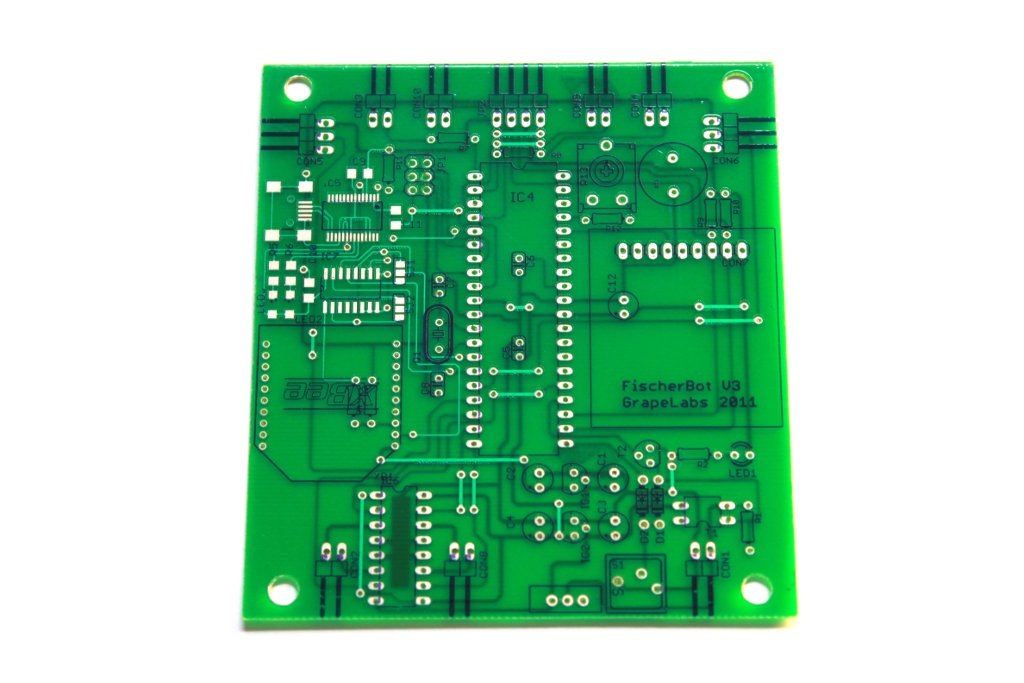
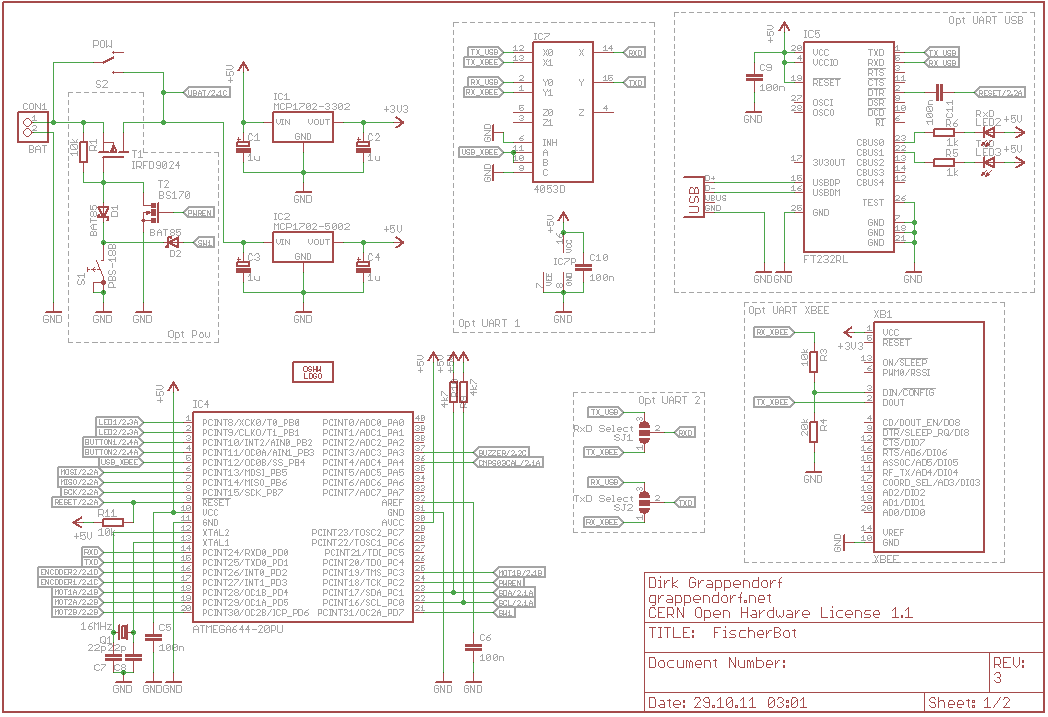
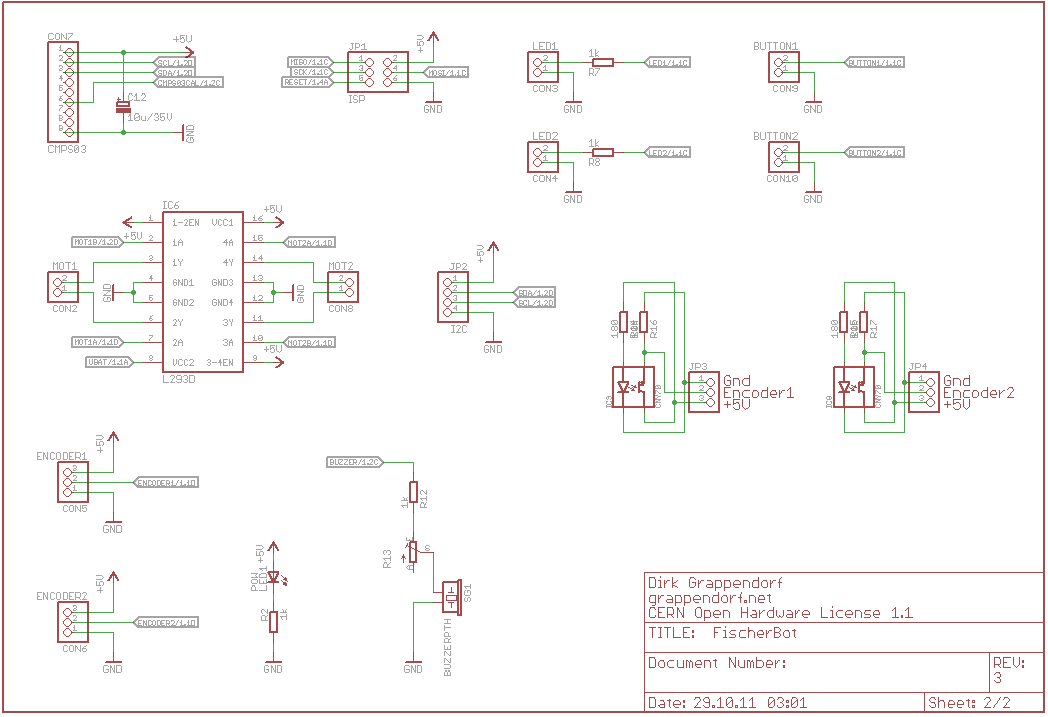
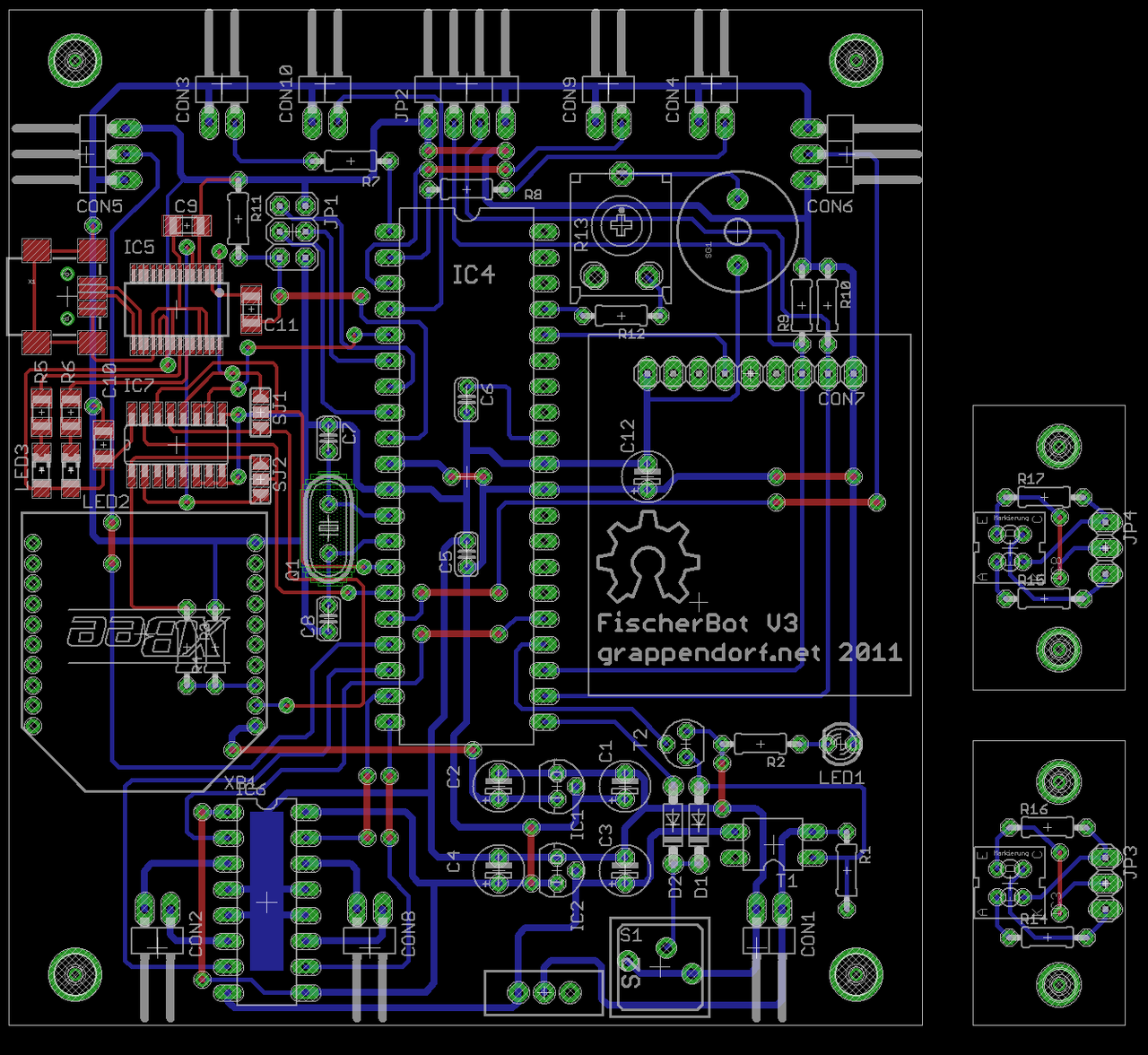
Board and Schematics
This was my first PCB with a solder mask and silk screen ( Bungard laminate).
But this is a lot of work and i think it's only worthwhile if the PCB's are visible in the finished product.
Eagle files (Schematics and PCB) can be found in the project file down below.
GitHub
 | The source code for this project is hosted on GitHub: https://github.com/grappendorf/fischerbot |